Introduction
I chose mechanical vibrations as a topic for tutorials because I did not give the subject sufficient attention as engineering student many years ago. I recall the maths being somewhat daunting so in these tutorials I present the maths step by step supported by a maths tutoriai for methods of solving second order ordinary differential equations.
This series of tutorials considers single degree of freedom systems with translational motion* and includes analysis of:
*As opposed to angular motion
- free vibrations
- free vibrations with damping
- forced vibrations without damping
- forced vibrations with damping
In this introductory tutorial we examine spring and mass models for each of the above systems, with viscous damping where appropriate, and establish the differential equations of motion where displacement x and time t are respectively the dependent and independent variables. In the subsequent tutorials we solve these equations and illustrate physical responses.
I have taken care to highlight the signs of parameters in free body diagrams when deriving these equations. In my experience some text books do not give this aspect sufficient attention.
Free vibrations
The spring and mass model for a free vibrating system with one degree of freedom is shown in Figure 1 below. Vector quantities directed along the x axis to the right are positive and to the left are negative.
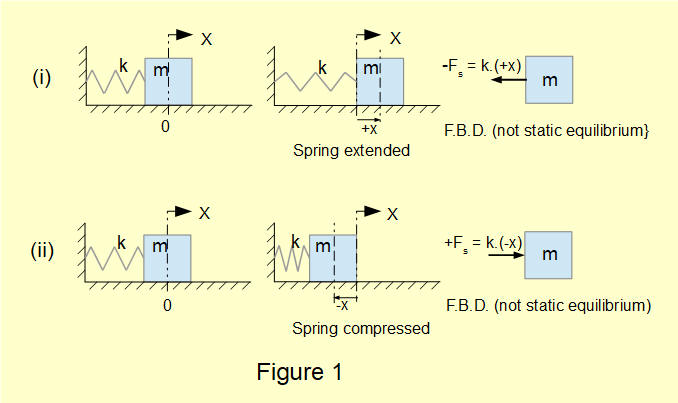
In this system mass m is attached to a spring and is free to move on a frictionless horizontal plane on axis X. In this idealised condition there is no damping to remove energy from the system.
Positions on the left show the spring and mass at x = 0 with no force exerted on the mass by the spring which is in its equilibrium state. According to Hooke's law the extended or compressed spring exerts a force Fs on the mass directly proportional to the displacement x and opposed to the displacement from the spring equilibrium position (in this case x = 0). This constant of proportionality is called the spring constant, denoted by k with units N/m.
With reference to Figure 1 we can express the spring force Fs acting on mass m as follows:(i) where x > 0: - Fs = k.(+x)
(ii) where x < 0 +Fs = k.(-x)
Thus both (i) and (ii) can be expressed as: Fs = - (k.x)
Free body diagrams (FBDs) for conditions (i) and (ii) do not show a condition of static equilibrium but are a snapshot of the mass in motion*. Fs is the only external force acting on the mass. From Newton's second law it follows that Fs = m.a, where a is the acceleration of mass m.
Thus m.a = - (k.x)
*An inertial force in accordance with D'Alembert's principle is not applicable because the FBD does not show a static equilibrium condition.

We conclude from this equation that the motion of the spring and mass system is simple harmonic motion (SHM) as it fulfils the definition of SHM, namely that a body moves with SHM if its acceleration is directly proportional to its displacement from a fixed point and is always directed towards that point. In this case the fixed point is the equilibrium position of the spring at x = 0.
The solution to this equation of motion and its interpretation is the subject of a separate tutorial.Free vibrations with damping
To represent damping we add viscous friction to the free vibration model of Figure 1 in the form of a dashpot shown in Figure 2 below. The dashpot is a piston and cylinder filled with a viscous liquid. Liquid flowing from one side of the moving piston to the other provides a controlled amount of resistance to movement.
This damping force, Fd is directly proportional to v, the velocity of the piston with a constant of proportionality c called the damping coefficient. c has units Ns/m.
Coulomb friction, which is not proportional to velocity, can also contribute to damping but is not included in this model.
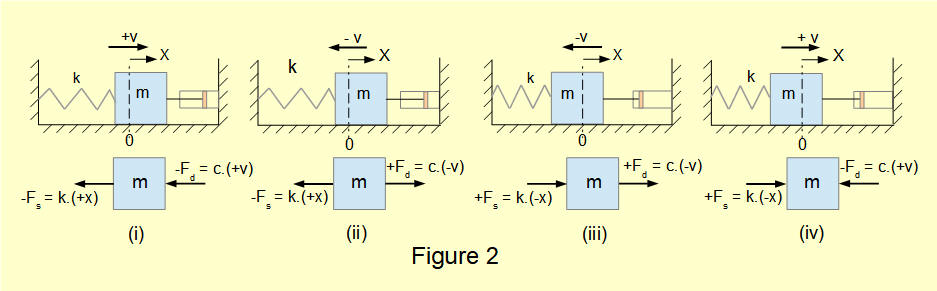
Figure 2 shows spring forces Fs and damping forces Fd in a damped spring and mass vibrating system at four dynamic phases over one cycle with respective dynamic free body diagrams (no inertial forces):
2(i) spring extension x is +ve, mass velocity v is +ve.
2(ii) spring extension x is +ve, mass velocity v is -ve.
2(iii) spring extension x is -ve, mass velocity v is -ve.
2(iv) spring extension x is -ve, mass velocity v is +ve.
It can be seen that for each of the above conditions damping force Fd = - (c.v).
Also for each condition the total external force Fext on the mass is Fext = Fs + Fd
Giving Fext = - [(k.x) + (c.v])
Thus by Newton's second law: - [(k.x) + (c.v]) = m.a

The solution to this equation of motion and its interpretation is the subject of a separate tutorial.
Forced free vibrations
We now consider the effect of applying an external force to a spring and mass system, in the first case without damping. The applied force is called a forcing function.
We apply the harmonic forcing function Ff = F0.cos(ωt)* where t is time, ω is the angular frequency of the periodic function and F0 is the amplitude in units of force.
*Choosing F0cos(ωt) as the forcing function determines that Ff = F0 at time t = 0 since cos(ωt) = 1. It is equally valid to choose F0sin(ωt) as the function in which case Ff = 0 at t = 0.
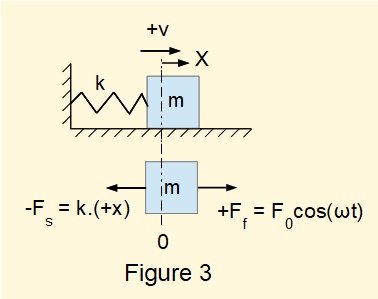
Figure 3 above shows the dynamic free body diagram for the system in a condition in the cycle where the spring is extended and the velocity of the mass is +ve.
The total external force Fext acting on the mass is Fext = + F0cos(ωt) - (k.x) which by Newton's second law gives:
F0cos(ωt) - (k.x) = m.a
It can be easily shown that this relation applies throughout the full cycle.
Thus the equation of motion for a free vibrating system with an applied harmonic forcing function is:
The solution to this equation of motion and its interpretation is the subject of a separate tutorial.
Forced free vibrations with damping
We now add damping to the free vibrating system with a harmonic forcing function considered in the previous section.
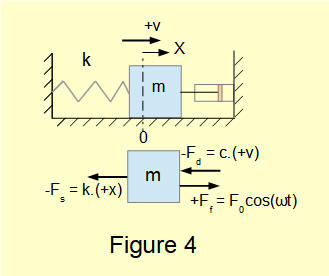
Figure 4 above shows the dynamic free body diagram for the system in a condition in the cycle where the spring is extended and the velocity of the mass is +ve, as in the previous section.
Viscous damping force - (Fd) = c.(+v) where c is the damping constant.
The total external force Fext acting on the mass is: Fext = + F0cos(ωt) - (c.v) - (k.x) which by Newton's second law gives:
F0cos(ωt) - (c.v) - (k.x) = m.a
It can be easily shown that this relation applies throughout the full cycle.
Thus the equation of motion for a damped vibrating system with an applied harmonic forcing function is:

The solution to this equation of motion and its interpretation is the subject of a separate tutorial.
Summary
The following differential equations of motion for vibrating systems provide the basis for the next sequence of tutorials:
These equations which have displacement x as the dependent variable and time t as the independent variable are second order, ordinary linear differential equations. The first two are homogeneous equations because the RHS equals 0. The latter two where the RHS is a function of the independent variable are non-homgeneous equations. The maths tutorial explains methods for solving both types of equation.
Next: Mechanical vibrations - maths tutorial
I welcome feedback at: