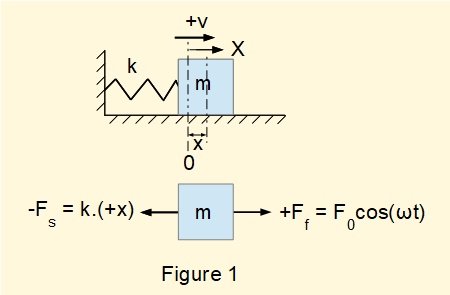
In the introductory tutorial in this series we considered a harmonic forcing function F0cos(ωt) applied to a translational spring and mass system oscillating on a frictionless horizontal plane with one degree of freedom. This system with mass m and spring constant k is shown in Figure 1 below with the spring extended by distance x
It should be understood that a completely undamped spring and mass oscillating system does not exist. Friction forces will in time dissipate the initial transient response after which the forcing function produces a steady state response. However, analysing the response to a forcing function of a system with no explicit damping term has merit in that it introduces important concepts, in particular the property of resonance.
From the dynamic* free body diagram shown in Figure 1 we obtained the following equation of motion in terms of displacement x and time t
*sum of forces produces acceleration of mass m, not static equilibrium
We now find a function x(t) that is a general solution to this equation. If you are not familiar with solving second-order non-homogeneous ordinary linear differential equations using the method of undetermined coefficients refer to the maths tutorial.
From the maths tutorial recall that the general solution to a second-order non-homogeneous ordinary linear differential equation is:
+
Step 1
Thus the first step is to find the general solution xh(t) to the complementary homogeneous equation:
From a previous tutorial we know the general solution to this equation is:

Step 2
We now propose a particular solution xp(t) to equation (1) of the form:
xp(t) = [A.cos(ωt) + B.sin(ωt)]
where A and B are undetermined coefficients and ω is the frequency of the harmonic forcing function.





Step 3
The general solution to equation (1) is xh(t) +xp(t) giving:

Equation (3) is a valid solution for all values of ω except ω = ωn which gives a duplicate solution containing the function cos(ωnt). The proposed particular solution for this condition takes the form:
xp(t) = [A.t.cos(ωnt) + B.t.sin(ωnt)] which we develop later.
Meanwhile continuing with a particular solution to equation (1) for ω ≠ ωn we find constants C1 and C2 for initial conditions x0 and v0 at time t = 0 where v0 = dx(t)/dt.

Thus from equation (3) the particular solution for equation (1) for initial conditions x0 and v0 is:

Resulting motion
We now explore characteristics of the forced vibratory motion defined by equation (4).
To simplify the analysis:
Recall that k = m.ωn2


The first term in equation (5) with cos(ωnt) derived from the general solution expresses the transient response attributable to the free vibration of the system. In practice this response dissipates because of friction.
The second term in equation (5) with cos(ωt) derived from the particular solution expresses the steady state response.
Steady state response
Using the second term in equation (5) for steady state response giving:
we consider steady state response for three conditions:
- ω > ωn
- ω < ωn
- ω = ωn
where ω is the frequency of the harmonic forcing function and ωn is the natural frequency of the free vibrating system.
We introduce a useful parameter of the forcing function called the static amplitude δ = (F0 / k) expressing the static displacement of mass m under force F0.
If X is the amplitude of the harmonic steady state response, the factor X/δ called the amplification factor is a measure of the amplification effected by the forcing function.
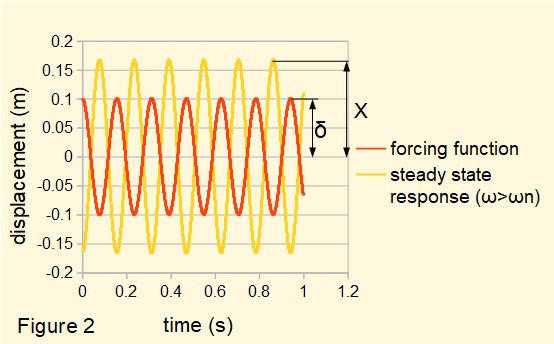
1. Consider ω > ωn
Figure 2 below plots the steady state response of the system when the frequency of the forcing function ω > ωn. Note the response is out of phase with the forcing function by 180°.
In this example frequency ratio ω/ωn = 1.26. Amplification factor (X/δ) ≈ 1.6.
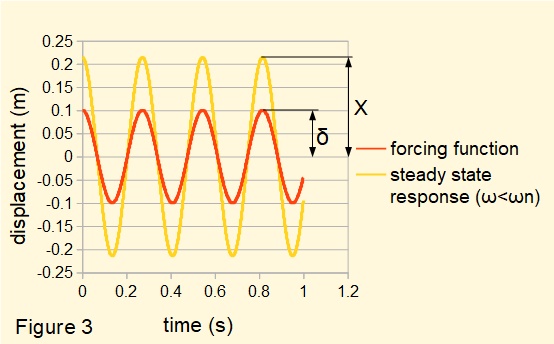
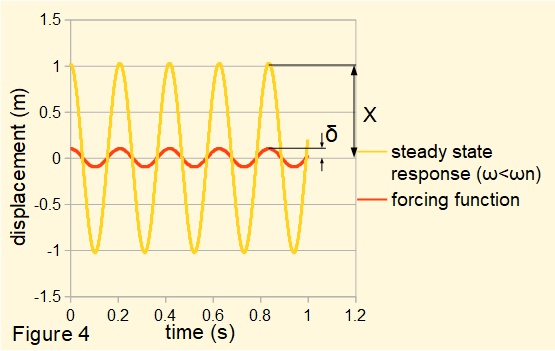
2. Consider ω < ωn
Figure 3 below plots the steady state response of the system when the frequency of the forcing function ω < ωn. Note the response is in phase with the forcing function.
In this example frequency ratio ω/ωn = 0.73. Amplification factor X/δ ≈ 2.2.
The general characteristics illustrated in Figures 2 and 3 can be deduced as follows.
Consider the term in equation (5) representing steady state response:
with respect to forcing function F0cos(ωt):
(a) If ω > ωn the coefficient X is negative and thus out of phase with the forcing function by 180°.
(b) If ω < ωn the coefficient X is positive and thus in phase with the forcing function.
(c) The smaller the difference between ω and ωn the greater the amplification factor X/δ.
Figure 4 below illustrates characteristic (c). Amplification factor X/δ ≈ 10 when frequency ratio ω/ωn = 0.95
3. Consider ω = ωn
Figure 5 below shows the relationship between the frequency ratio ω/ωn and the absolute value of amplification factor X/δ.
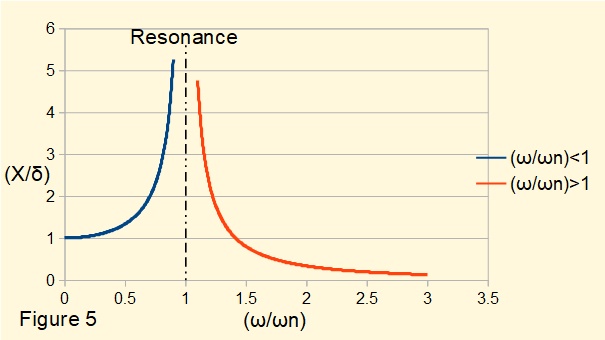
Note the different characteristics as ω approaches ωn for ω < ωn and ω > ωn.
This condition when ω is very close to or equals ωn is known as resonance where the theoretical amplification factor tends to infinity. In practice physical constraints limit the amplitude of vibration.
Combined transient and steady state response
Figures 2 to 5 illustrate the steady state condition of a free vibrating system subjected to a harmonic forcing function after transient effects are eliminated by the small amount of damping inherent in the system. We now consider the response including the transient term in cos(ωnt) from equation (5).

Figures 6 and 7 below are plots for equation (7) with parameters ω = 40 rad/s and ωn = 30 rad/s (frequency ratio = 0.75) giving the equation:
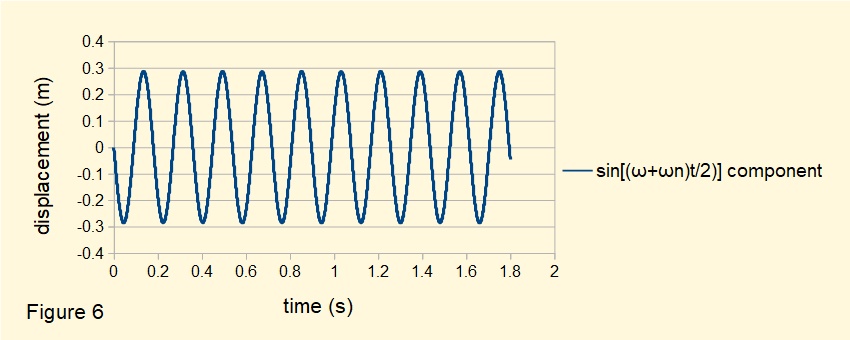
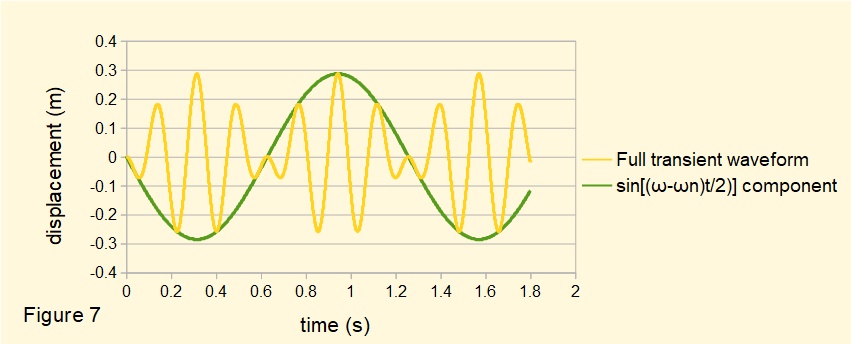
Figure 6 plots the waveform for the sin[(ω + ωn)/2] component of equation 8.
Figure 7 plots the full waveform of equation 8 with the waveform for the sin[(ω - ωn)/2] component superimposed.
These waveforms illustrate the phenomenon of beating where the amplitude varies periodically in a regular pattern. In this example the frequency of the resultant waveform is a function of sin(35t) and the envelope of the beat is a function of sin(5t). Beating can often be detected in sound waves generated by vibration.
General solution to equation for condition ω = ωn
For the final part of this tutorial we develop a general solution to the equation:
for the condition where ω = ωn.
Recall that the general solution to non-homogeneous equation (1) comprises two parts. The first part is the general solution to the complementary homogeneous equation which in a previous tutorial was found to be:
The second part of the general solution is a particular solution to the non-homogeneous equation.
Recall from above that the particular solution xp(t) = [A.cos(ωt) + B.sin(ωt)] for conditions where
ω > ωn and ω < ωn was not valid for the condition ω = ωn.
The proposed particular solution for the condition ω = ωn takes the form*:
xp(t) = [A.t.cos(ωnt) + B.t.sin(ωnt)] --------- (9)
* by the reduction of order method referred to the maths tutorial




To find undetermined coefficients A and B in equation (11) let initial condition t = 0
gives: 2m.ωnB - 0 = F0
Thus: B = F0/2m.ωn
Substitute in equation (11) for B
Gives F0.cos(ωnt) - 2m.ωnA = F0.cos(ωnt)
Thus A = 0
Substituting for A and B in equation (9) gives the particular solution for condition ω = ωn as:

Thus the general solution to equation (1) for condition ω = ωn is:

From equation (12) find constants C1 and C2 for initial conditions x0 and v0 at time t = 0
where v0 = dx(t)/dt.
Substituting in equation (12) gives:
x0 = C1 + 0 + 0
Thus C1 = x0
From equation (12):

Substituting for t = 0 in equation (13) gives:
v0 = ωnC2
Thus C2 = v0/ωn
Giving the particular solution for equation (1) when ω = ωn with initial conditions x0 and v0:

To simplify the analysis of the motion represented by equation (14) let x0 and v0 = 0 giving:
Figure 8 below plots the function x(t) given in equation (14).
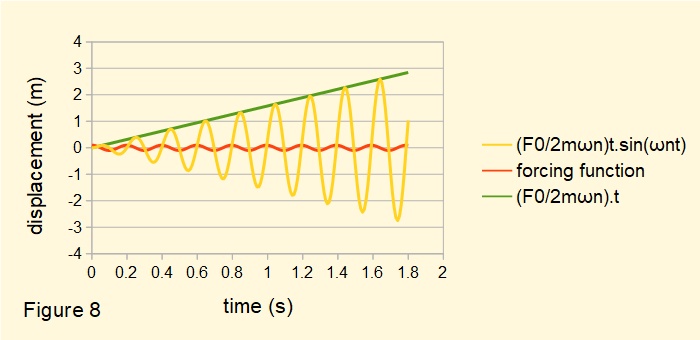
This plot shows the harmonic resonant response (yellow) induced by forcing function (red) F0cos(ωt) for ω = ωn implied by the steady state response for ω → ωn illustrated in Figure 5 above.
Note that line (green) x(t) = (F0 / 2mωn).t expresses the increase in amplitude of the vibration. Note also the harmonic response sin(ωnt) and forcing function cos(ωnt) are out of phase by 90°.
Next: Forced vibrations with damping
I welcome feedback at: